Ref: EWTGURT380
RT 380 Optimisation de boucles de régulation (Réf. 080.38000)
Le thème de cet appareil d'essai est l'interaction du régulateur et du système réglé.
L'objectif est ici que la boucle de régulation fermée, constituée du régulateur et du système réglé, montre le comportement optimal désiré.
Grâce à l'utilisation d'un logiciel de simulation, on peut s'exercer intensivement et sans danger au réglage des paramètres de régulateur, très important dans la pratique.
Des notions telles que boucle de régulation ouverte ou fermée, stabilité, réponse à un échelon, la réponse aux perturbations et le comportement de pilotage sont mises ici en évidence de manière intuitive.
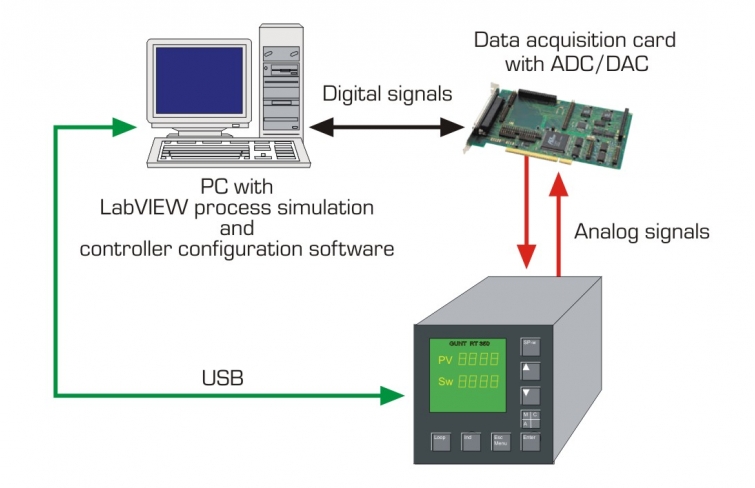
La particularité de cet appareil d'essai est qu'il n'utilise pas de modèles réels de systèmes réglés, mais que le système réglé est simulé sur le PC à l'aide d'un logiciel de simulation développé par GUNT.
Ce principe est largement répandu dans l'industrie pour le développement de produits et connu sous le nom de Hardware in Loop (HIL).
Tous les types importants de systèmes réglés peuvent être sélectionnés dans le logiciel.
Les paramètres du système réglé sont réglables dans des limites étendues, de sorte qu'à la différence des systèmes réels, les situations limites peuvent être testées également.
Le comportement dans le temps peut être enregistré dans le logiciel et évalué.
La liaison entre le régulateur et le PC se fait via une carte d'acquisition de données de mesure avec convertisseur AN et NA.
Le régulateur utilisé peut être paramétré de manière simple et confortable via une interface depuis le PC à l'aide du logiciel de configuration fourni.
La documentation didactique bien structurée expose les principes de base et guide létudiant dans la réalisation des essais.
L'objectif est ici que la boucle de régulation fermée, constituée du régulateur et du système réglé, montre le comportement optimal désiré.
Grâce à l'utilisation d'un logiciel de simulation, on peut s'exercer intensivement et sans danger au réglage des paramètres de régulateur, très important dans la pratique.
Des notions telles que boucle de régulation ouverte ou fermée, stabilité, réponse à un échelon, la réponse aux perturbations et le comportement de pilotage sont mises ici en évidence de manière intuitive.
La particularité de cet appareil d'essai est qu'il n'utilise pas de modèles réels de systèmes réglés, mais que le système réglé est simulé sur le PC à l'aide d'un logiciel de simulation développé par GUNT.
Ce principe est largement répandu dans l'industrie pour le développement de produits et connu sous le nom de Hardware in Loop (HIL).
Tous les types importants de systèmes réglés peuvent être sélectionnés dans le logiciel.
Les paramètres du système réglé sont réglables dans des limites étendues, de sorte qu'à la différence des systèmes réels, les situations limites peuvent être testées également.
Le comportement dans le temps peut être enregistré dans le logiciel et évalué.
La liaison entre le régulateur et le PC se fait via une carte d'acquisition de données de mesure avec convertisseur AN et NA.
Le régulateur utilisé peut être paramétré de manière simple et confortable via une interface depuis le PC à l'aide du logiciel de configuration fourni.
La documentation didactique bien structurée expose les principes de base et guide létudiant dans la réalisation des essais.
Contenu didactique / Essais
- élaboration de relations fondamentales de la technique de régulation
boucle de régulation constituée du régulateur et
du système réglé
différence entre boucle de régulation ouverte et
fermée
- adaptation du régulateur à différents systèmes réglés
détermination des paramètres du système réglé
choix des paramètres optimaux de régulateur
application des règles usuelles d'ajustage
étude du comportement de pilotage et la réponse
aux perturbations
étude de la stabilité de la boucle de régulation
fermée
Les grandes lignes
- Comportement d'une boucle de régulation fermée
- Sélection des paramètres de régulateur optimaux
- Règles d'ajustage telles que Ziegler-Nichols
- Stabilité et réponse transitoire
- Simulation de systèmes réglés par logiciel
Les caractéristiques techniques:
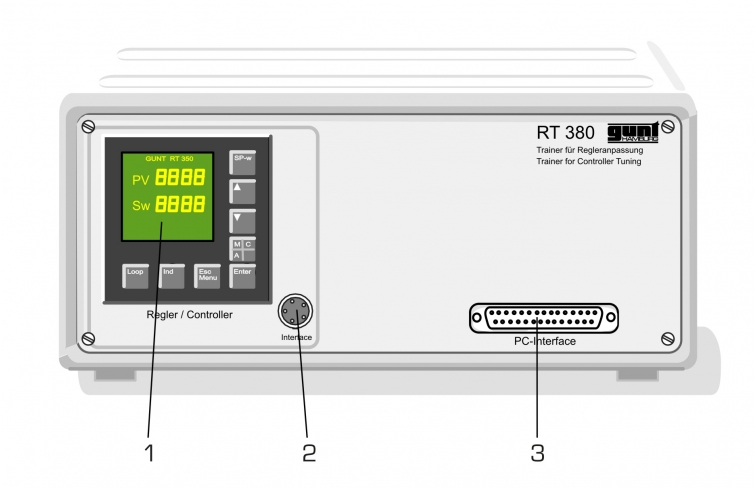
Régulateur
- configurable en régulateur P, PI ou PID
- K ~p~: 0...999,9%
- T ~v~: 0...1200s
- T ~n~: 0...3600s
Grandeurs de processus comme signaux analogiques
- 0...10V
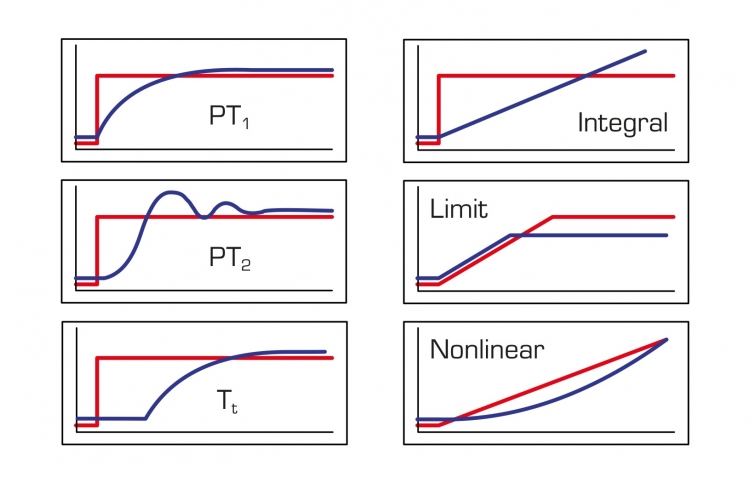
Modèle de simulation de système réglé avec comportement P, I, PT ~1~, PT ~2~, T ~t~, non-linéarité et limitation
- élaboration de relations fondamentales de la technique de régulation
boucle de régulation constituée du régulateur et
du système réglé
différence entre boucle de régulation ouverte et
fermée
- adaptation du régulateur à différents systèmes réglés
détermination des paramètres du système réglé
choix des paramètres optimaux de régulateur
application des règles usuelles d'ajustage
étude du comportement de pilotage et la réponse
aux perturbations
étude de la stabilité de la boucle de régulation
fermée
Les grandes lignes
- Comportement d'une boucle de régulation fermée
- Sélection des paramètres de régulateur optimaux
- Règles d'ajustage telles que Ziegler-Nichols
- Stabilité et réponse transitoire
- Simulation de systèmes réglés par logiciel
Les caractéristiques techniques:
Régulateur
- configurable en régulateur P, PI ou PID
- K ~p~: 0...999,9%
- T ~v~: 0...1200s
- T ~n~: 0...3600s
Grandeurs de processus comme signaux analogiques
- 0...10V
Modèle de simulation de système réglé avec comportement P, I, PT ~1~, PT ~2~, T ~t~, non-linéarité et limitation
Informations logistiques
Dimensions et poids
Lxlxh: 370x330x150mm
Poids: env. 5kg
Nécessaire au fonctionnement
230V, 50/60Hz, 1 phase ou 120V, 60Hz/CSA, 1 phase
Liste de livraison
1 appareil d'essai
1 carte d'acquisition de données de mesure
1 CD avec le logiciel de simulation GUNT pour modèles de systèmes réglés et le logiciel de configuration pour le régulateur
1 jeu de câbles de raccordement de l'appareil
d'essai au PC
1 documentation didactique
Lxlxh: 370x330x150mm
Poids: env. 5kg
Nécessaire au fonctionnement
230V, 50/60Hz, 1 phase ou 120V, 60Hz/CSA, 1 phase
Liste de livraison
1 appareil d'essai
1 carte d'acquisition de données de mesure
1 CD avec le logiciel de simulation GUNT pour modèles de systèmes réglés et le logiciel de configuration pour le régulateur
1 jeu de câbles de raccordement de l'appareil
d'essai au PC
1 documentation didactique
Techniques > Maintenance - Productique > Régulation > Régulateurs
Techniques > Génie des Procédés > Principes de base du génie des procédés > Régulateurs, systèmes réglés, mise en réseau
Poids: 5 Kg Delai de livraison estimé : 16 semaines